Graphics and Image Data Types¶
约 2058 个字 10 行代码 10 张图片 预计阅读时间 10 分钟
1-Bit Image¶
1-Bit Image 也叫做二值图像(Binary Image)或者单色图像(Monochrome Image),是一种只包含黑白两种颜色的图像。

8-Bit Image¶

整个图像可以理解为由像素值构成的二维矩阵,这种数据结构被称为位图(Bitmap)。
Print¶
Question
如何将 8-Bit Image 以 1-Bit Image 的形式打印出来?
先给出一个概念:DPI(Dots Per Inch)是打印机的分辨率单位,表示每英寸上的点数。
打印这类图像(如位图)时,由于打印机本身的色彩或灰度精度有限(如黑白打印机只能输出纯黑或纯白),直接输出可能导致颜色过渡生硬或细节丢失。此时需要通过抖动(Dithering)技术,将强度分辨率(即颜色/灰度的精细程度)转换为空间分辨率(通过像素点的空间分布模拟颜色层次)。
Dithering¶
核心策略是通过将单个像素值替换为更大的图案(如 2×2 或 4×4 网格),使印刷网点数量近似模拟传统半色调印刷(halftone printing)中使用的可变尺寸墨点(例如报纸照片印刷)。其本质是将色彩分辨率转换为空间分辨率。
-
数学表征:一个 N×N 矩阵可呈现 N²+1 级灰度
2×2 图案可呈现 5 种灰度等级

对于 8-Bit Image,可以通过抖动技术将其转换为 1-Bit Image。首先将图像像素值从 0~255 重新映射至 0~4 范围,方法是通过整数除法(除以 256/5)。
为什么是 256/5?
因为 5 是 2×2 矩阵的可以表示的最大灰度等级,要使得 0~255 范围内的值映射到 0~4,需要将 256 等分为 5 份。
- 若像素值为 0,则在印刷输出的 2×2 区域内不打印任何网点;
- 若像素值为 4,则打印该区域内的全部 4 个网点。
核心规则
阈值判定:若像素强度值 大于 抖动矩阵(dither matrix)对应位置的阈值,则在矩阵条目位置打印实心网点。
- 这里的抖动矩阵例如:
$$ \begin{bmatrix} 0 & 2 \ 3 & 1 \end{bmatrix} $$
像素扩展:将每个像素替换为 n×n 点阵,导致输出图像尺寸显著增加。例如:
- 原始图像为 N×N 像素;
- 使用 4×4 点阵替换每个像素时,输出图像尺寸将变为 4N×4N,即扩大16倍!
优化 | Standard Pattern¶
在刚刚的方法里,我们的输出图像尺寸增大了很多,这是不可接受的。因此,我们需要对这个方法进行优化,避免输出图像尺寸的显著增加。
我们采用 标准阈值矩阵(Standard Pattern) 方法。
- 预存一个与目标输出尺寸相同的整数矩阵(0-255),称为标准模式矩阵。
- 操作规则:将灰度图像矩阵与标准模式矩阵逐位置比较,当灰度值 > 模式矩阵对应位置的阈值时,打印实心网点。
例如,对于一个25灰度等级的图像,标准模式矩阵如下:
 当我们的灰度值为 15 时,输出的图像如下:
当我们的灰度值为 15 时,输出的图像如下:

Print an image (\(600 \times 450 \times 8\)bit) on a paper (\(8 \times 6\) inch) by a printer with \(300 \times 300\) DPI, what’s the size of each pixel (dots)?
问的是每一个像素要打多少点
- Paper Size: \(8 \times 6\) inch
- DPI: \(300 \times 300\)
-
Dots of paper: \(8 \times 300 \times 6 \times 300\)
-
Dots of image: \(600 \times 450\)
- Size of each pixel: \(\frac{8 \times 300 \times 6 \times 300}{600 \times 450}=16\)
这样子打出来的图像只有17个灰度等级,这就是产生失真的原因。
24-Bit Image¶
24-Bit Image 是一种真彩图像,每个像素由 RGB 三个通道组成,每个通道占 8 位,共 24 位。
很多24-Bit Image 实际上以 32 位的形式存储,其中 8 位用于存储 \(\alpha\) 值及特殊效果信息,例如透明度标识符(transparency flag)。
- α通道功能:
- 透明度控制:α值定义像素的不透明度(Opacity),范围通常为 0(全透明) 至 255(完全不透明)。
- 混合公式:半透明图像颜色 = 源图像颜色 × (1 – 透明度) + 背景图像颜色 × 透明度
8-Bit Color Image¶
8-Bit Color Image 是一种伪彩图像,每个像素由 8 位的索引值表示,对应调色板中的一种颜色。
核心机制:
- 索引颜色与查找表(Lookup Table/Palette)
- 图像数据不直接存储实际颜色值,而是存储索引字节(0-255),每个索引对应调色板中的一条 3字节RGB颜色(如索引42 → RGB(120,200,50))。

- **技术优势**
- 将颜色存储空间从每像素3字节压缩至1字节(256色),显著减少文件体积。
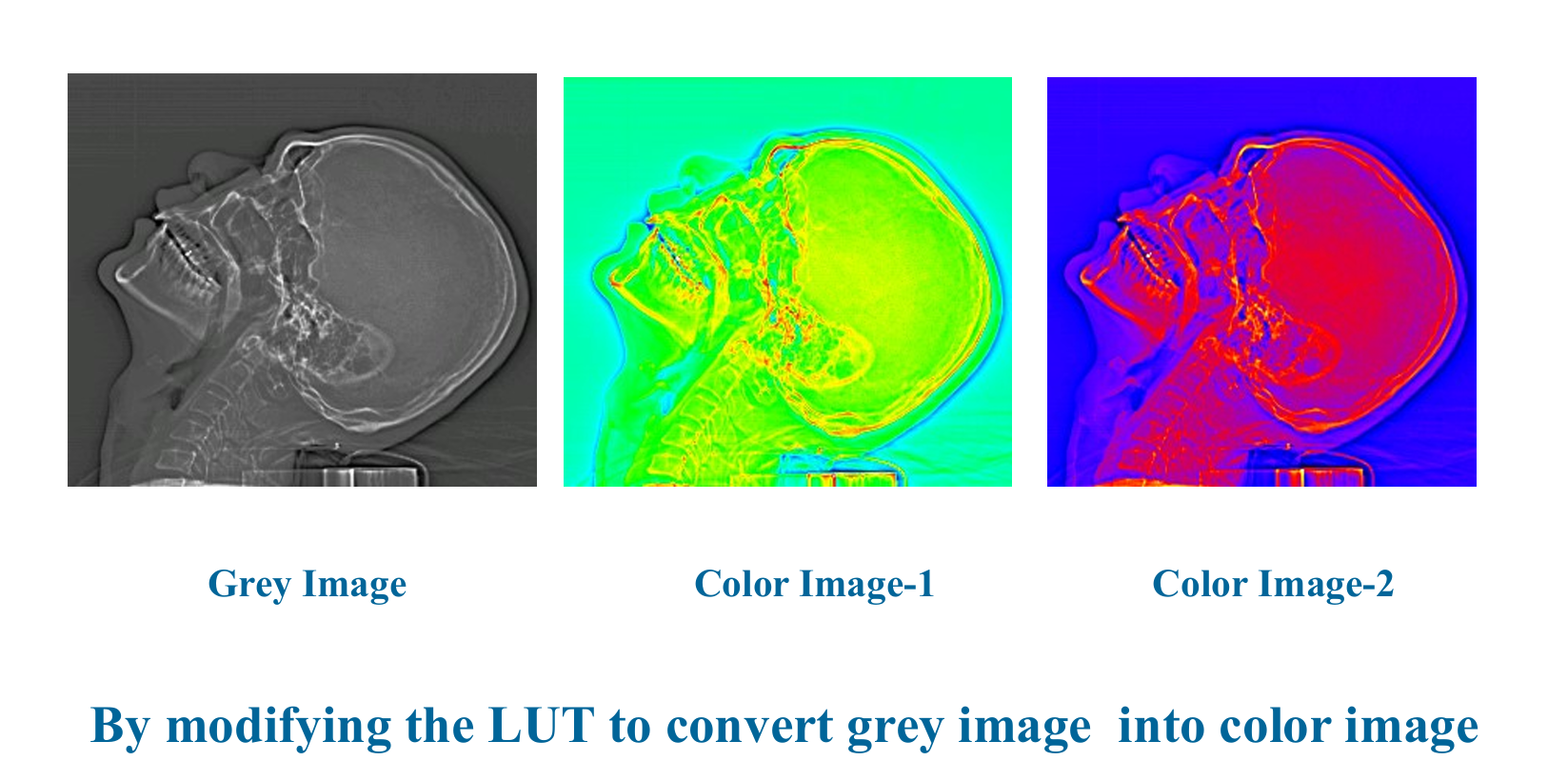
- 只要更换调色板,即可实现图像颜色风格的**快速切换**。
常见查找表:

调色板生成算法¶
- 关键任务:从全色域(16,777,216色)中选取最具代表性的256色。
均匀切片法(Equal Slicing)¶
将RGB颜色立方体在R、G、B三个维度上切割,基于人眼对红(R)、绿(G)更敏感的特性,将 8 位颜色表示中 R,G,B 的分配设为 3:3:2。

但是在这种简单的颜色量化方法中,相邻像素的微小RGB变化可能导致索引值突变,产生边缘伪影(Edge Artifacts),是不好的,所以我们引入 Median-cut 算法。
Median-cut算法¶
Median-cut算法通过中位切分最小化子区域内的颜色方差,最大化子区域间差异,将量化误差集中在人眼不敏感区域,从而减少伪影。

- 1. 定位最小包围盒(Find the smallest box)
- 目标:确定包含图像中所有颜色的最小RGB立方体。
- 示例:若图像颜色范围为R∈[50,200]、G∈[30,180]、B∈[0,255],则包围盒定义为该区间的三维空间。
- 意义:缩小后续处理范围,减少无效计算。
- 2. 沿最长维度排序(Sort along the longest dimension)
- 动态通道选择:
计算包围盒各维度(R/G/B)的跨度(Max - Min),选择跨度最大的通道作为切分轴。- 示例:若R跨度最大(图3.11中R通道直方图分布广),则优先沿R轴排序颜色。
- 排序规则:将包围盒内所有颜色的选定通道值升序排列,准备中位切分。
- 3. 中位切分(Split at the median)
- 中位点定义:
找到排序后颜色列表的中位点,使得前半部分与后半部分颜色数量相等(非几何中点)。- 直方图辅助:通过累计像素计数快速定位(如图3.11中垂线所示)。
- 切分动作:
将包围盒分为两个子区域:- 子盒1:原盒前半部分(R ≤ 中位值)
- 子盒2:原盒后半部分(R > 中位值)
- 4. 递归迭代(Repeat until 256 regions)
- 递归条件:对每个子盒重复步骤2-3,直至总区域数达到目标(如256个)。
- 终止逻辑:
- 每次切分将区域数翻倍(2 → 4 → 8 → ... → 256)。
- 优先切分高密度区域:始终选择当前盒中最长维度操作,确保颜色密集区域被细化。
- 5. 计算代表色(Assign representative color)
- 均值计算:对每个最终子盒内的所有颜色,计算其RGB均值作为代表色。
- 公式:
[ R_{\text{rep}} = \frac{1}{N}\sum R_i, \quad G_{\text{rep}} = \frac{1}{N}\sum G_i, \quad B_{\text{rep}} = \frac{1}{N}\sum B_i ] - 作用:代表色是子盒内颜色的统计中心,最小化局部量化误差。
- 公式:
- 6. 像素映射与LUT构建(Pixel assignment & LUT)
- 欧氏距离匹配:
将每个原始像素的RGB值与所有代表色计算欧氏距离,选择最近的代表色作为其映射目标。- 距离公式:
[ d = \sqrt{(R - R_{\text{rep}})^2 + (G - G_{\text{rep}})^2 + (B - B_{\text{rep}})^2} ]
- 距离公式:
- 构建LUT:
- LUT结构:256行 × 3列(每行存储一个代表色的24位RGB值)。
- 索引存储:图像像素值替换为对应LUT索引(0-255),实现8位压缩。