第8章 图象的检测及模板匹配
图象的分割与检测(识别)实际上是一项非常困难的工作。很难说清楚为什么图象应该分割成这样而不是那样。人类的视觉系统是非常优越的,它不仅包含了双眼,还包括了大脑,可以从很复杂的景物中分开并识别每个物体,甚至可以毫不费力地跟上每秒好几十帧变化的图象。举两个例子来说明一下人类视觉系统的优越性。
|
图8.1 单词THE |
图8.2 看不见的三角 |
图8.1是单词THE,这一点很容易看出来,但仔细观察一下,就会发现,图中少了很多线条。在我们人类看来很简单的一件事,让计算机来做就很困难了。
图8.2中尽管没有任何线条,但我们还是可以很容易的看出中间存在着一个白色三角形。计算机却很难发现。
由于人类在观察图象时适用了大量的知识,所以没有任何一台计算机在分割和检测真实图象时,能达到人类视觉系统的水平。正因为如此,对于大部分图象应用来说,自动分割与检测还是一个将来时。目前只有少数的几个领域(如印刷体识别OCR)自动识别达到了实用的水平。
也许算是题外话,我们可以憧憬这样一种应用:基于内容的搜索。在一场足球比赛的录象中,用户可以输入命令,由计算机自动搜索出所有射门的镜头并显示在屏幕上。目前,我们能从一幅图象中获得的信息只是每个象素的颜色或灰度值,除此以外别无其它,完成上述功能实在是太困难了。所以说解决图象分割和检测最根本的方法是在编码(成象)时就给予考虑。这也正是MPEG4及未来的视频压缩编码标准的主要工作。
正因为有上述的困难,所以我们今天要介绍的只是一些最基本,最简单的算法和思想,针对也只能是一些具体(而不是通用)的应用。算法共有三个:投影法、差影法和模板匹配。
8.1 投影法
在介绍投影法之前,我先出一道题目,下面的这幅照片是著名的华盛顿纪念碑(我记得在“阿甘正传”中曾经看到过它),怎样从图中自动检测到水平方向上纪念碑的位置。
仔细观察,不难发现,纪念碑上象素的灰度都差不多而且与众不同,如果我们选取合适的阈值,做削波处理(这里选175到220),将该图二值化,如图8.3所示:
|
图8.3 华盛顿纪念碑 |
图8.4 削波处理,将图8.3二值化 |

由于纪念碑所在的那几列的白色点比起其他列多很多,如果把该图在垂直方向做投影,如图8.5所示。
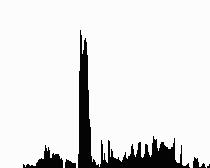
图8.5 图8.4做垂直方向投影
其中,黑色线条的高度代表了该列上白色点的个数。图中间的高峰部分就是我们要找的水平方向上纪念碑所在的位置,这就是投影法。
可以看出投影法是一种很自然的想法,有点象灰度直方图。为了得到更好的效果,投影法经常和阈值化一起使用。由于噪声点对投影有一定的影响,所以处理前最好先做一次平滑,去除噪声。
以下是投影法的源程序,第二个参数是个BOOL变量,为真时表示在水平方向上做投影,否则在垂直方向上做投影。要注意的是,我们针对的虽然是二值图,但为了处理的方便,用的是256级灰度图,不过只用到了0和255两种灰度级。
BOOL Projection(HWND hWnd,BOOL Hori)
{
DWORD OffBits,BufSize;
LPBITMAPINFOHEADER lpImgData;
LPSTR lpPtr;
HLOCAL hTempImgData;
LPBITMAPINFOHEADER lpTempImgData;
LPSTR lpTempPtr;
HDC hDc;
HFILE hf;
LONG x,y;
int num;
//用的是256级灰度图,不过只用到了0和255两种灰度级。
if( NumColors!=256){
MessageBox(hWnd,"Must be a mono bitmap with grayscale palette!",
"Error Message",MB_OK|MB_ICONEXCLAMATION);
return FALSE;
}
//到位图数据的偏移值
OffBits=bf.bfOffBits-sizeof(BITMAPFILEHEADER);
//缓冲区大小
BufSize=OffBits+bi.biHeight*LineBytes;
//为新图缓冲区分配内存
if((hTempImgData=LocalAlloc(LHND,BufSize))==NULL)
{
MessageBox(hWnd,"Error alloc memory!","Error Message",
MB_OK|MB_ICONEXCLAMATION);
return FALSE;
}
lpImgData=(LPBITMAPINFOHEADER)GlobalLock(hImgData);
lpTempImgData=(LPBITMAPINFOHEADER)LocalLock(hTempImgData);
//新图缓冲区初始化为255
memset(lpTempImgData,(BYTE)255,BufSize);
//拷贝头信息
memcpy(lpTempImgData,lpImgData,OffBits);
if(Hori)
{
//水平投影
for(y=0;y<bi.biHeight;y++){
lpPtr=(char *)lpImgData+(BufSize-LineBytes-y*LineBytes);
num=0; //计数器初始化为0
for(x=0;x<bi.biWidth;x++)
if(*(lpPtr++)!=0) //是白点
num++; //计数器加1
lpTempPtr=(char *)lpTempImgData+(BufSize-LineBytes-y*LineBytes);
for(x=0;x<num;x++)
*(lpTempPtr++)=0; //在新图中,该行中共有num个黑点
}
}
else{ //垂直投影
for(x=0;x<bi.biWidth;x++){
num=0; //计数器初始化为0
lpPtr=(char *)lpImgData+(BufSize-LineBytes)+x;
for(y=0;y<bi.biHeight;y++){
if(*lpPtr!=0)
num++; //计数器加1
lpPtr-=LineBytes;
}
lpTempPtr=(char *)lpTempImgData+OffBits+x;
for(y=0;y<num;y++){
*lpTempPtr=0; //在新图中,该列中共有num个黑点
lpTempPtr+=LineBytes;
}
}
}
if(hBitmap!=NULL)
DeleteObject(hBitmap);
hDc=GetDC(hWnd);
//创立一个新的位图
hBitmap=CreateDIBitmap(hDc,(LPBITMAPINFOHEADER)lpTempImgData,
(LONG)CBM_INIT,
(LPSTR)lpTempImgData+
sizeof(BITMAPINFOHEADER)+
NumColors*sizeof(RGBQUAD),
(LPBITMAPINFO)lpTempImgData,
DIB_RGB_COLORS);
//起不同的结果文件名
if(Hori)
hf=_lcreat("c:\\hproject.bmp",0);
else
hf=_lcreat("c:\\vproject.bmp",0);
_lwrite(hf,(LPSTR)&bf,sizeof(BITMAPFILEHEADER));
_lwrite(hf,(LPSTR)lpTempImgData,BufSize);
_lclose(hf);
//释放内存和资源
ReleaseDC(hWnd,hDc);
LocalUnlock(hTempImgData);
LocalFree(hTempImgData);
GlobalUnlock(hImgData);
return TRUE;
}
8.2 差影法
差影法的原理非常简单:将前后两幅图象相减,得到的差作为结果结果图象。图8.6、图8.7、图8.8能够说明差影法的原理。
|
图8.6 前景+背景 |
图8.7 背景 |
图8.8 图8.6、图8.7 相减的结果 |



图8.6是前景图(猫)加背景图(木星)。图8.7是背景图。图8.6减图8.7的结果如图8.8所示,这样就得到了前景(不完全是前景,因为背景的灰度值并不为零,但至少可以得到前景的形状)。
差影法是非常有用的,比如说可以用在监控系统中。在银行金库内,摄像头每隔一小段时间,拍摄一幅图,与上一幅图做差影;如果差别超过了预先设置的阈值,说明有人,这时就应该拉响警报。
我们在介绍灰度窗口变换时,曾经提到了电影“阿甘正传”特技中应用了“蓝幕”技术,其实也包含了差影法的原理。
以下是差影法的源程序。要注意的是,第一幅图的文件名为c:\test.bmp,第二幅图的文件名是c:\backgnd.bmp。它们有着相同的灰度值和调色板。执行时,这两个文件都已经准备好。我们针对的虽然是二值图,但为了处理的方便,用的是256级灰度图,不过只用到了0和255两种灰度级。
BOOL Subtraction(HWND hWnd)
{
DWORD OffBits,BufSize;
LPBITMAPINFOHEADER lpImgData;
LPSTR lpPtr;
HGLOBAL hSecond;
LPBITMAPINFOHEADER lpSecondImgData;
LPSTR lpSecondPtr;
HLOCAL hTempImgData;
LPBITMAPINFOHEADER lpTempImgData;
LPSTR lpTempPtr;
HDC hDc;
HFILE hf;
LONG x,y;
int num,pos;
//用的是256级灰度图,不过只用到了0和255两种灰度级。
if( NumColors!=256){
MessageBox(hWnd,"Must be a mono bitmap with grayscale palette!",
"Error Message",MB_OK|MB_ICONEXCLAMATION);
return FALSE;
}
if((hf=_lopen("c:\\backgnd.bmp",OF_READ))==HFILE_ERROR){
//背景图没找到
MessageBox(hWnd,"File c:\\backgnd.bmp not found!","Error Message",
MB_OK|MB_ICONEXCLAMATION);
return FALSE;
}
//到位图数据的偏移值
OffBits=bf.bfOffBits-sizeof(BITMAPFILEHEADER);
//缓冲区大小
BufSize=OffBits+bi.biHeight*LineBytes;
//为背景图的数据分配内存
if((hSecond=GlobalAlloc(GHND,BufSize))==NULL)
{
MessageBox(hWnd,"Error alloc memory!","Error Message",
MB_OK|MB_ICONEXCLAMATION);
_lclose(hf);
return FALSE;
}
//指向该内存指针
lpSecondImgData=(LPBITMAPINFOHEADER)GlobalLock(hSecond);
//文件指针指到BITMAPINFOHEADER结构开始的地方
_llseek(hf,sizeof(BITMAPFILEHEADER),FILE_BEGIN);
//读入头信息和位图数据
_lread(hf,(LPSTR)lpSecondImgData,BufSize);
_lclose(hf);
//为结果图缓冲区分配内存
if((hTempImgData=LocalAlloc(LHND,BufSize))==NULL)
{
MessageBox(hWnd,"Error alloc memory!","Error Message",
MB_OK|MB_ICONEXCLAMATION);
GlobalUnlock(hSecond);
GlobalFree(hSecond);
return FALSE;
}
lpImgData=(LPBITMAPINFOHEADER)GlobalLock(hImgData);
lpTempImgData=(LPBITMAPINFOHEADER)LocalLock(hTempImgData);
//新图缓冲区初始化为255
memset(lpTempImgData,(BYTE)255,BufSize);
//拷贝头信息
memcpy(lpTempImgData,lpImgData,OffBits);
for(y=0;y<bi.biHeight;y++){
pos=(BufSize-LineBytes-y*LineBytes);
//lpPtr指向第一幅图,lpSecondPtr指向第二幅图,lpTempPtr指向结果图
lpPtr=(char *)lpImgData+pos;
lpSecondPtr=(char *)lpSecondImgData+pos;
lpTempPtr=(char *)lpTempImgData+pos;
for(x=0;x<bi.biWidth;x++){
num=(unsigned char)*(lpPtr++);
num-=(unsigned char)*(lpSecondPtr++);
*(lpTempPtr++)=(unsigned char)fabs(num);
//两者相减取绝对值,存入新图中
}
}
if(hBitmap!=NULL)
DeleteObject(hBitmap);
hDc=GetDC(hWnd);
//创立一个新的位图
hBitmap=CreateDIBitmap(hDc,(LPBITMAPINFOHEADER)lpTempImgData,
(LONG)CBM_INIT,
(LPSTR)lpTempImgData+
sizeof(BITMAPINFOHEADER)+
NumColors*sizeof(RGBQUAD),
(LPBITMAPINFO)lpTempImgData,
DIB_RGB_COLORS);
hf=_lcreat("c:\\subtract.bmp",0);
_lwrite(hf,(LPSTR)&bf,sizeof(BITMAPFILEHEADER));
_lwrite(hf,(LPSTR)lpTempImgData,BufSize);
_lclose(hf);
//释放内存和资源
ReleaseDC(hWnd,hDc);
GlobalUnlock(hSecond);
GlobalFree(hSecond);
LocalUnlock(hTempImgData);
LocalFree(hTempImgData);
GlobalUnlock(hImgData);
return TRUE;
}
8.3 模板匹配
利用模板匹配可以在一幅图象中找到已知的物体。比如抓拍到了一张射门的照片,要在该照片中找到足球的位置。这时就可以采用模板匹配的方法。所谓模板匹配,其实想法很简单:拿已知的模板(在本例中为足球的图象),和原图象中同样大小的一块区域去对。
最开始时,模板的左上角点和图象的左上角点是重合的,拿模板和原图象中同样大小的一块区域去对比,然后平移到下一个象素,仍然进行同样的操作,……所有的位置都对完后,差别最小的那块就是我们要找的物体。
我们用平方误差之和来衡量原图中的块和模板之间的差别。假设模板的大小为m×n(宽×高);图象的大小为Width×Height。模板中的某点坐标为(x0,y0),该点的灰度为U(x0,y0);与之重合的图象中的点坐标为(X0-x0,Y0-y0),该点的灰度为V(X0-x0,Y0-y0)。则一次匹配的结果为:
![]()
全部图象都匹配后,找到最小的即为结果。可以看到模板匹配的运算量是惊人的。一次匹配都要做m×n次减法,m×n次平方,m×n-1次加法,整个图象要匹配(Width-m+1) ×(Height-n+1)次。
源程序不再给出,有兴趣的读者可以自己完成。